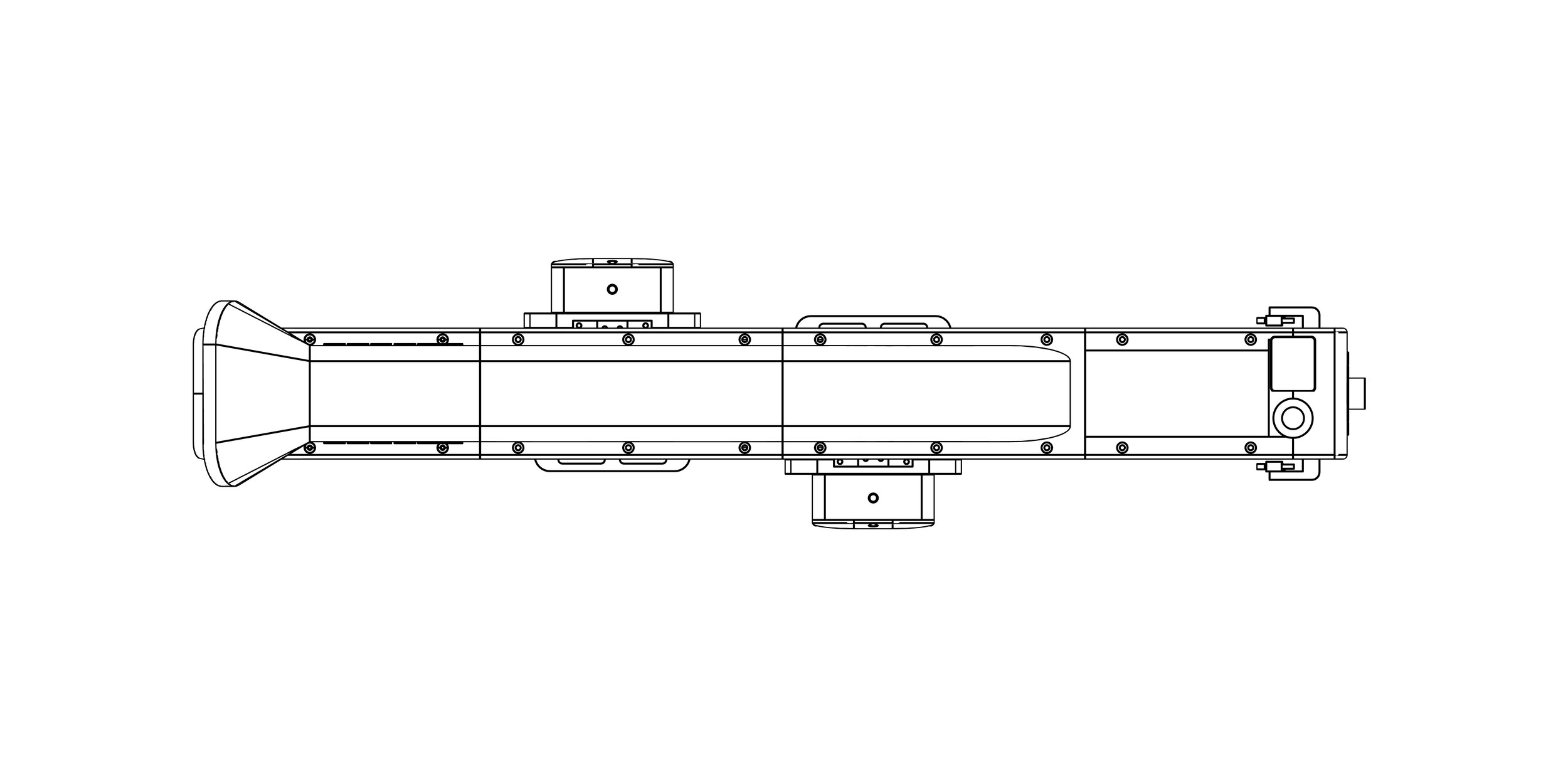
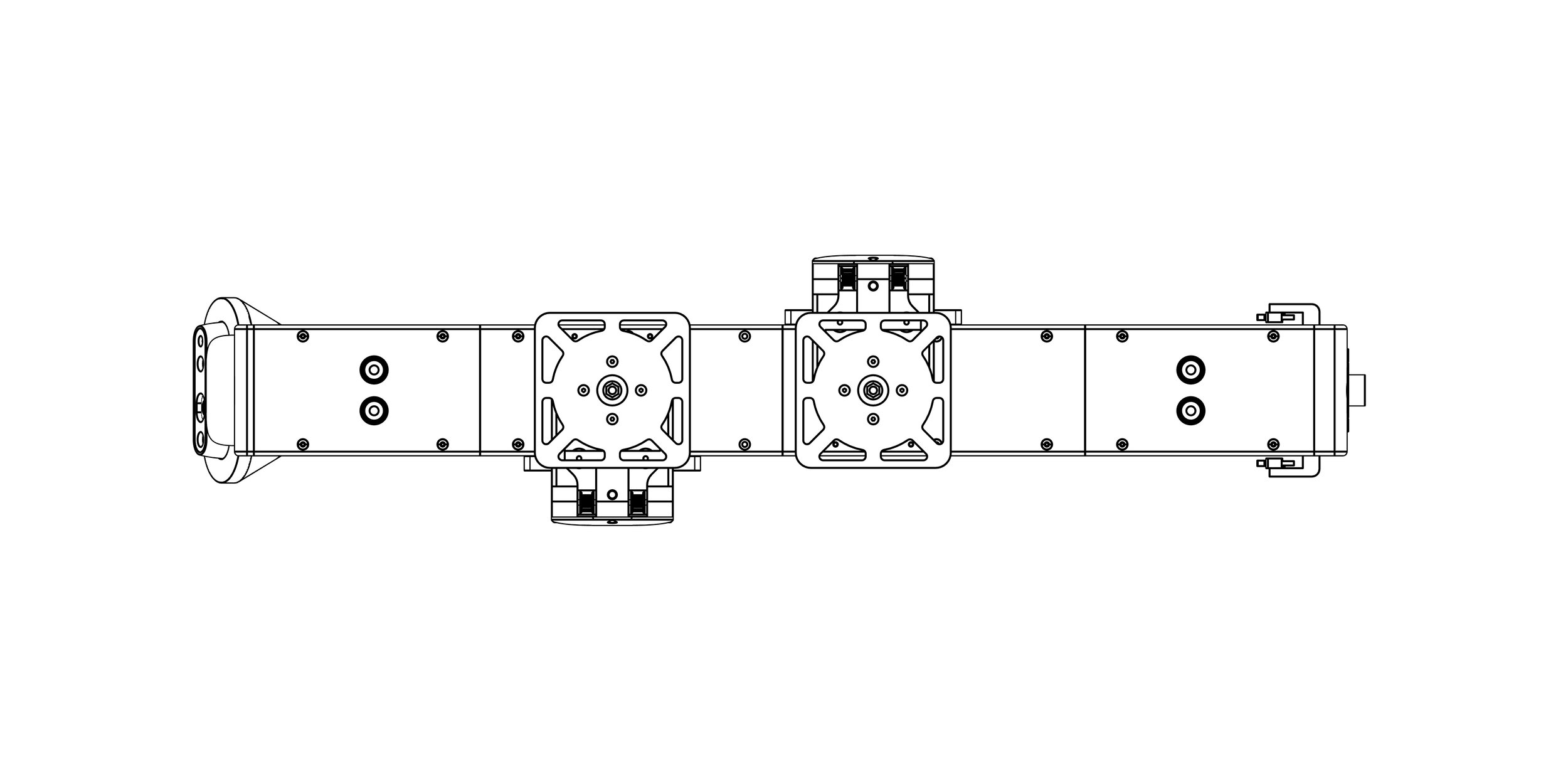
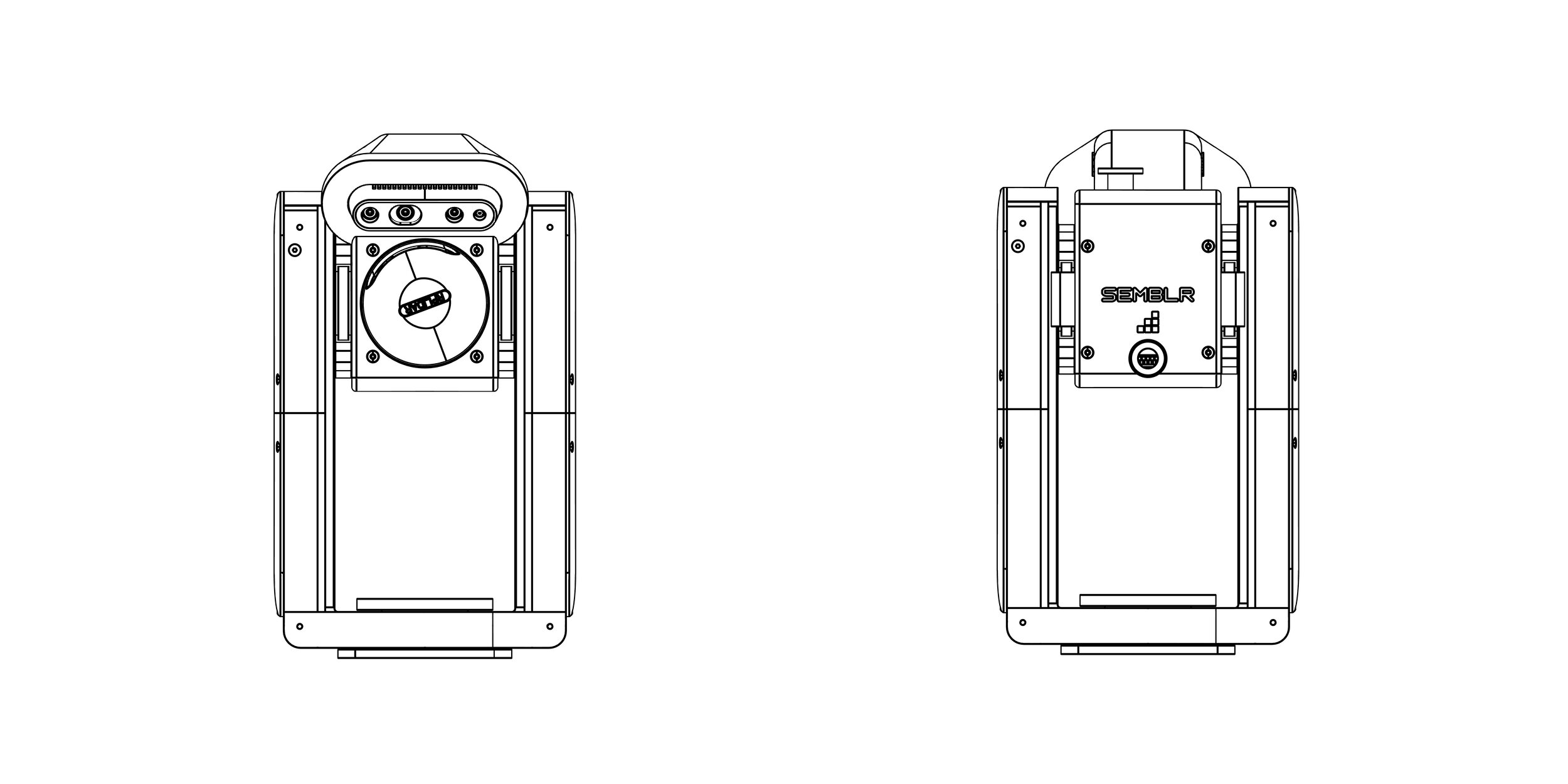
Walking Construction Robot (2019)
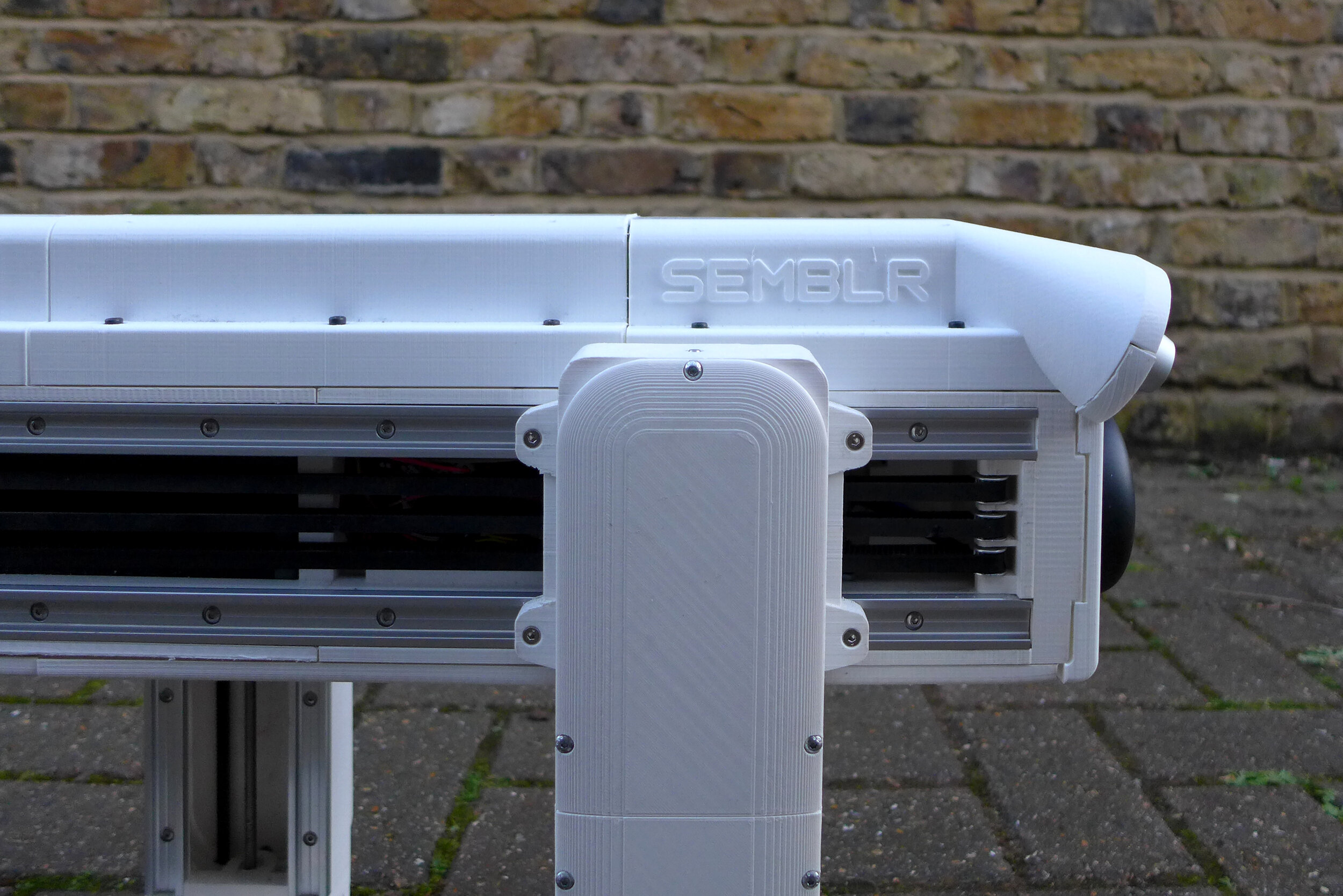
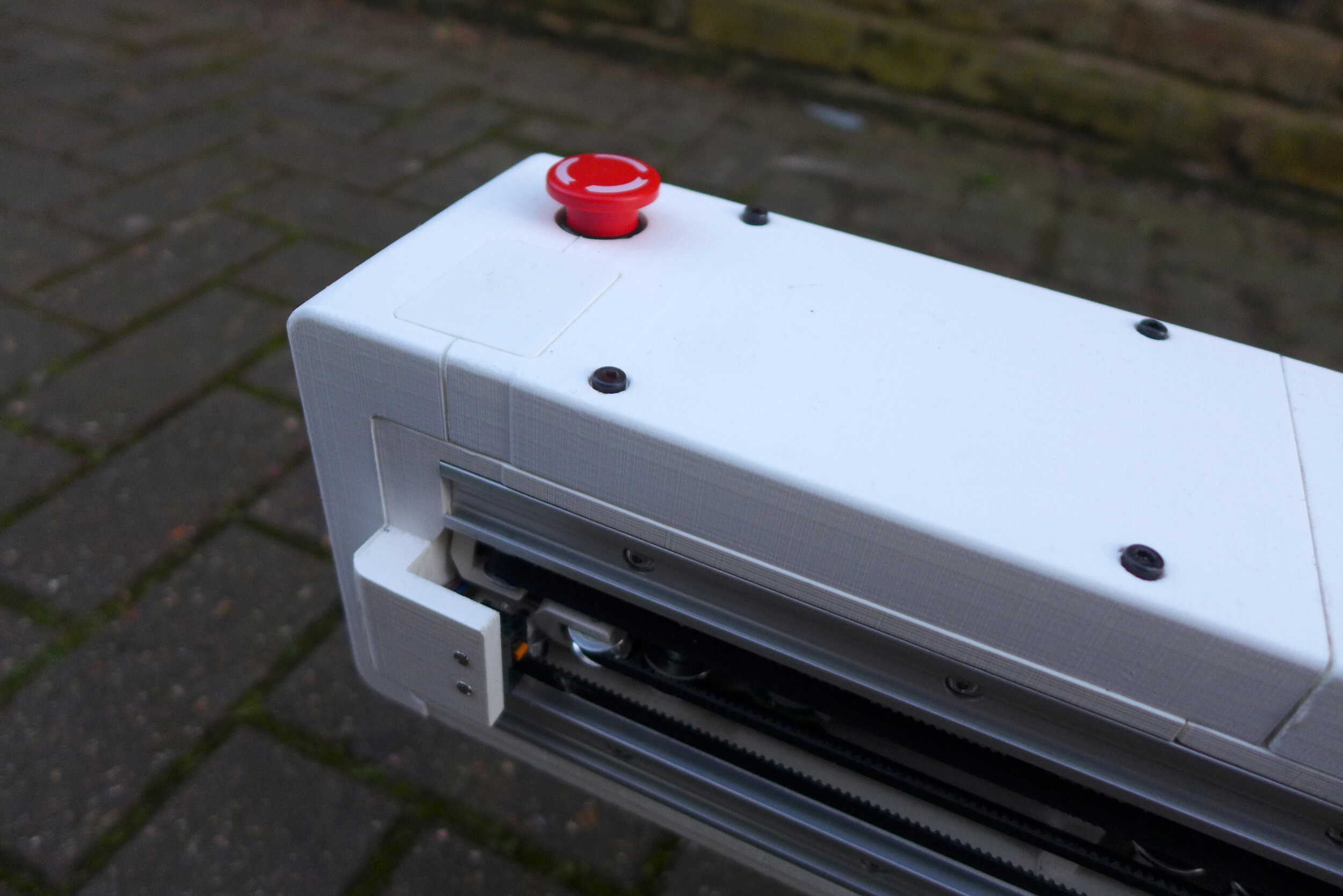
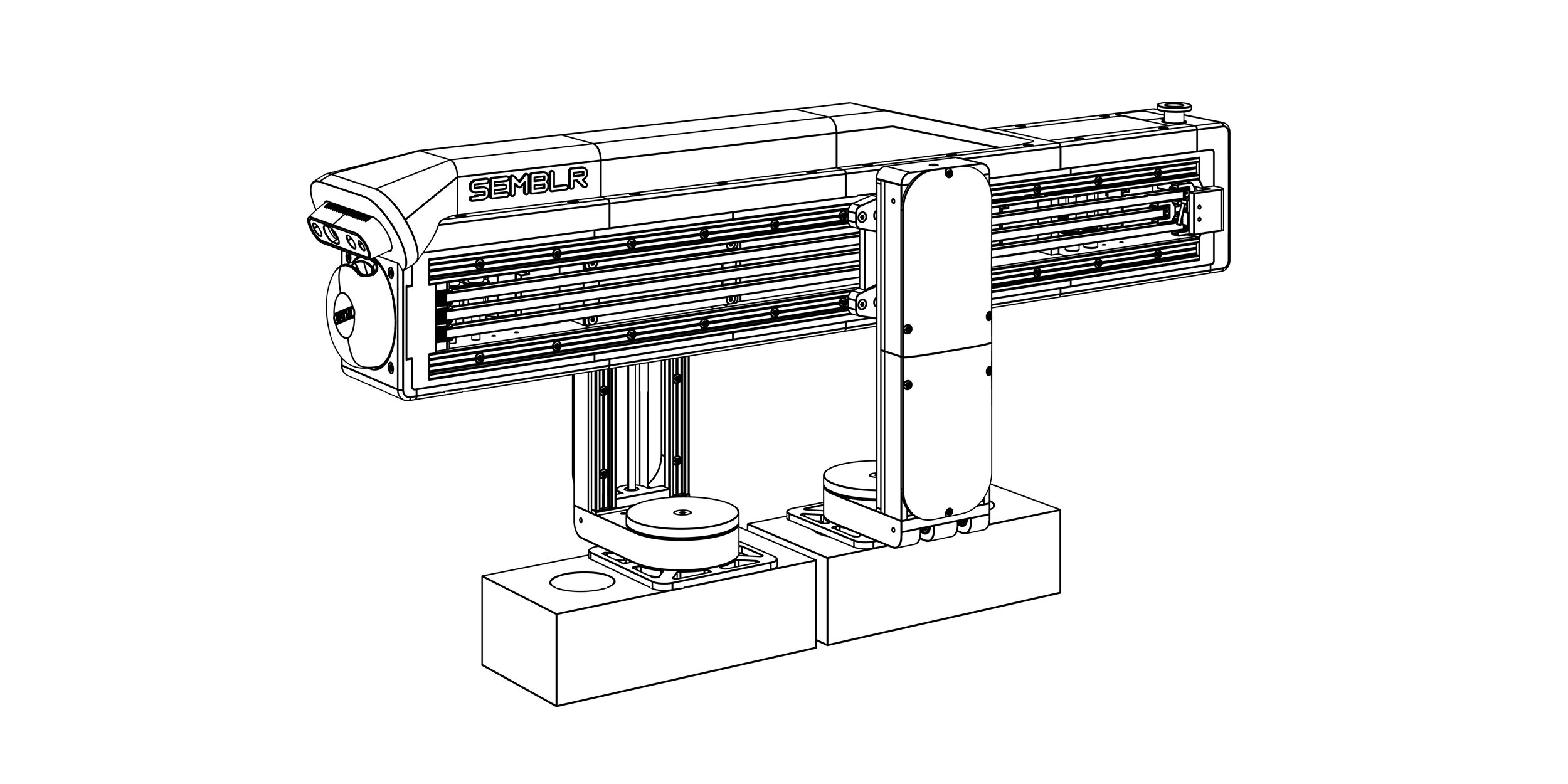
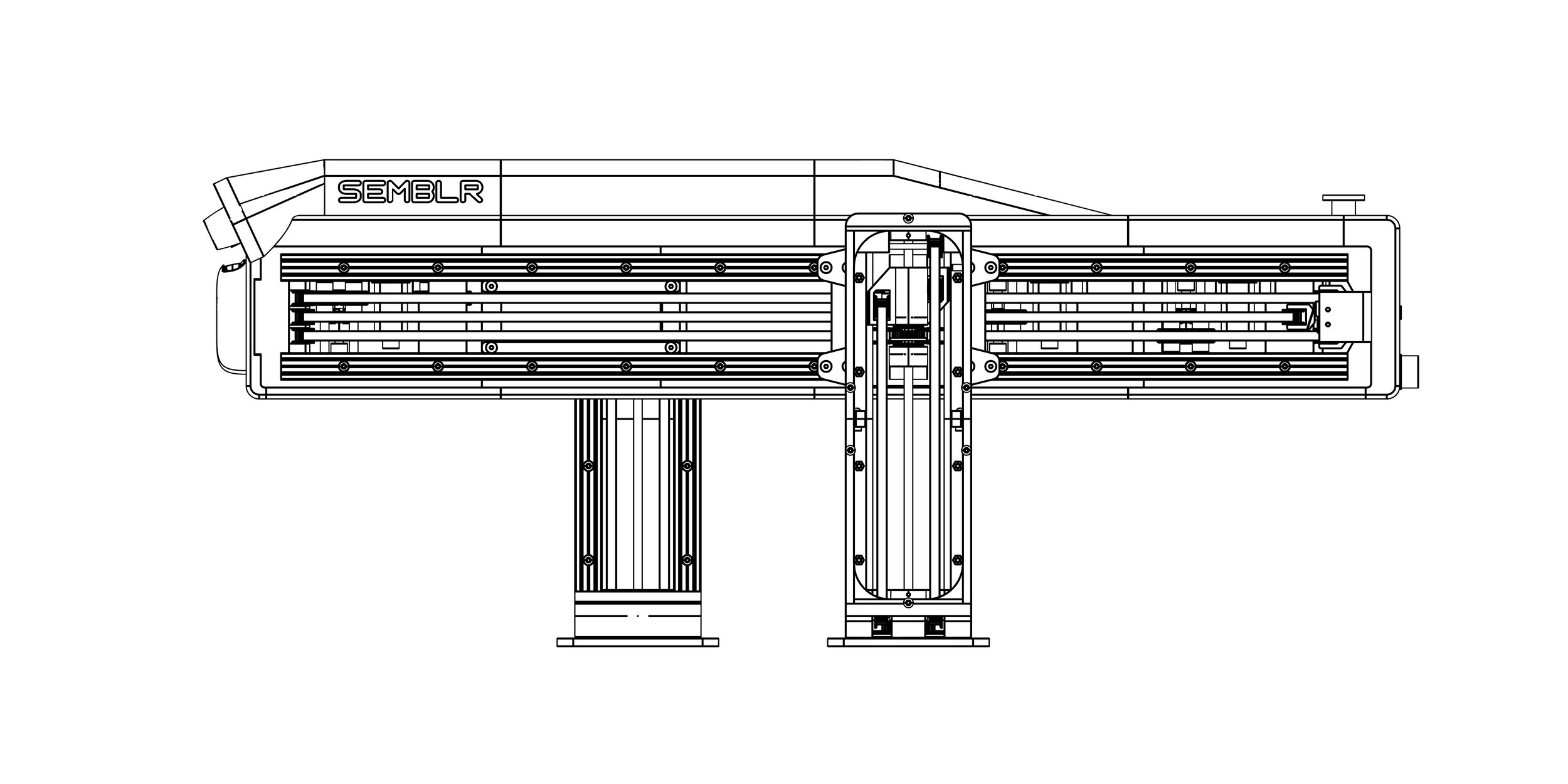
This is an evolution of the Relative Bricklaying Robot, improved to allow a full step-over bipedal gait and thus a quicker stepping cycle time. The robot uses it’s legs and chassis to stabilise itself in each stage of motion. While other robot morphologies can be more dynamically stable, this design was investigated to explore its capacity to transport heavy loads (greater than its own body weight) using inexpensive motors and gearboxes. Simulations show the same robot with gripper mounted under its chassis to transport and place bricks.
Video: Hardware Testing